Introduzione ai sensori ad ultrasuoni
Alcuni dei nostri articoli precedenti si concentravano sui sensori utilizzati nelle autovetture. Ora descriviamo una soluzione che, sebbene non sia il sensore più comunemente utilizzato nell’industria automobilistica, ha una vasta gamma di applicazioni in altri segmenti dell’industria.
Nell’articolo seguente presentiamo il principio di funzionamento e la costruzione del sensore ad ultrasuoni, nonché diversi esempi del suo utilizzo in veicoli e altre strutture.
Genesi
Come tutti i nostri sensi, le orecchie hanno un certo intervallo di percezione al di sotto e al di sopra del quale non siamo in grado di sentire i suoni. La letteratura professionale pone i limiti superiore e inferiore di questa gamma in modo diverso, ma di solito indica 16 Hz o 20 Hz (gamma inferiore) e 16.000 Hz o 20.000 Hz (gamma superiore). Il valore esatto dipende, ovviamente, dalla salute, dall’età e da molti altri fattori fisiologici. A frequenze inferiori a questo valore si parla di infrasuoni, mentre al di sopra di questo valore si parla di ultrasuoni.
Il suono si comporta quindi come un’onda e la sua velocità di propagazione dipende in gran parte dal mezzo: nell’aria, ad un’altezza di 0 m sul livello del mare. ad una temperatura di 20°C viaggia ad una velocità di 340 metri al secondo. Ciò non dipende dalla frequenza del suono emesso, ma quest’ultimo ha un’influenza decisiva sulla distanza che può percorrere nell’atmosfera.

Gli infrasuoni hanno una bassa frequenza e una lunga lunghezza d’onda, quindi non sono i più efficaci per le comunicazioni ravvicinate, ma possono percorrere lunghe distanze. Alcune specie animali sono in grado di seguire la pioggia del deserto perché possono rilevare la luce infrarossa nei fulmini a grande distanza.
Gli ultrasuoni vengono assorbiti dall’atmosfera molto più velocemente, ma a distanze più brevi si rivela un’ottima misura di distanza. L’esempio più comune del loro utilizzo in natura sono i sistemi di comunicazione di alcune specie di pipistrelli, che consentono loro di cacciare. Il pipistrello emette ultrasuoni, quindi può avvicinarsi silenziosamente alla preda e localizzarne con precisione la posizione, anche nella completa oscurità.
I sensori a ultrasuoni utilizzano esattamente lo stesso metodo.
Principio di funzionamento
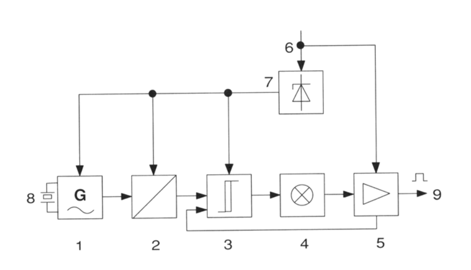
I sensori a ultrasuoni funzionano riflettendo le onde sonore ad alta frequenza nella gamma degli ultrasuoni. Dopo aver emesso un breve segnale a impulsi, il sensore passa dalla modalità trasmettitore alla modalità ricevitore, cioè passa da altoparlante a microfono e rileva il segnale riflesso.
Nei sensori a ultrasuoni, la frequenza del suono utilizzata rientra in un ampio intervallo, solitamente tra 30 e 300 kHz, e la frequenza di ripetizione dell’impulso va da 1 a 100 Hz. I segnali di disturbo provenienti dall’ambiente, diversi dagli impulsi riflessi, possono essere esclusi utilizzando i filtri.
L’esempio seguente illustra perfettamente il funzionamento di un sensore a ultrasuoni.
Nel caso a sinistra non c’è nulla nel campo visivo del sensore, solo un muro di riferimento la cui posizione è nota durante il test.
Sotto il sensore vediamo una schermata che mostra due picchi di impulsi identici. La distanza tra i due picchi sullo schermo corrisponde alla distanza del muro dal sensore.
Nel secondo caso, tra il sensore a ultrasuoni e la parete viene posto un oggetto ad una distanza “D”. Poiché questo oggetto non blocca l’intero campo visivo, il sensore rileverà comunque il muro, ma non con una riflessione del segnale così forte come nel primo caso, quando non c’era nulla che si frapponesse.
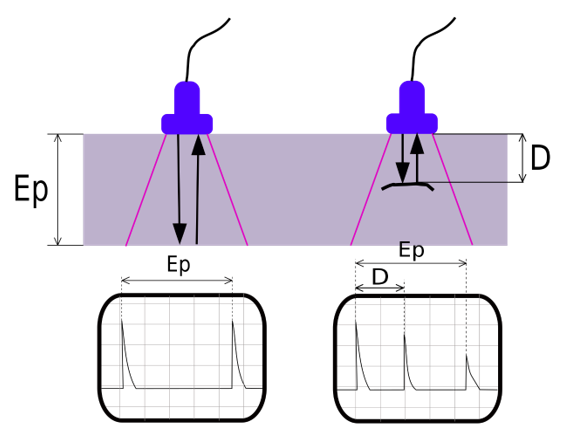
Il sensore riceverà due risposte all’impulso: una dall’oggetto e una dal muro. Poiché l’oggetto è più vicino, il segnale riflesso ritornerà più velocemente da lì.
Nella schermata di destra la distanza tra il primo e il secondo punto corrisponderà alla distanza tra l’oggetto e il sensore, mentre il primo e il terzo picco corrisponderanno ancora alla distanza tra il sensore e il muro.
Si può notare che se si conosce la distanza dal muro (grazie al processo di calibrazione), la posizione di qualsiasi oggetto posizionato nella zona del sensore può essere determinata quasi in tempo reale.
Ciò è vero se non altro perché un sensore a ultrasuoni non ha limitazioni materiali come nel caso dei sensori induttivi. Può essere utilizzato per rilevare praticamente qualsiasi oggetto, indipendentemente dal materiale, dalla forma, dal colore e in parte anche dal suo stato materiale: può essere liquido o polvere.
Caratteristica
La tensione operativa dei sensori è solitamente di 24 V, ma la loro distanza di varia notevolmente poiché vengono utilizzati in diverse applicazioni, spaziando da 100 millimetri a 1 metro, ma non è raro trovare sensori con una portata di 10 metri.
Tuttavia, questo sensore ha anche un punto debole: uno dei suoi limiti è la temperatura ambiente. Il sensore ad ultrasuoni non può essere utilizzato a temperature inferiori a 0 °C e non tollera temperature molto elevate, con un limite massimo di 70 °C.
La sua frequenza di commutazione va da 1 Hz a 125 Hz e la sua durata è generalmente lunga. Questo dispositivo è moderatamente sensibile allo sporco, quindi può essere utilizzato in ambienti polverosi, umidi e fumosi.
Implementazioni pratiche
Il modo più semplice e più comune di utilizzo nelle autovetture è rappresentato dal radar di parcheggio e la telecamera di retromarcia. Si tratta quasi sempre di sensori a ultrasuoni.
I veicoli a guida autonoma sono generalmente dotati di tali sensori laterali, sebbene in alcuni casi le funzioni di rilevamento della distanza siano eseguite anche da sensori ottici (ad esempio Tesla).
Al di fuori dell’industria automobilistica, l’elenco delle applicazioni è infinito: rilevamento dei prodotti sulle linee di produzione (conteggio, smistamento) e anche come strumento popolare per controlli non distruttivi sui materiali. Un sensore di questo tipo può essere trovato nei sonar dei siluri, in un dispositivo che esegue test a ultrasuoni di gravidanza, per il controllo del livello del liquido in vari serbatoi e nei sensori di movimento dei sistemi di sicurezza.








